RELIABLE NAVIGATION IN EXTENDED GPS-DENIED FLIGHT WITH THE
ANELLO X3 IMU
THE ANELLO X3 IMU - UNLOCKING RELIABLE FLIGHT IN GPS-DENIED AIRSPACE

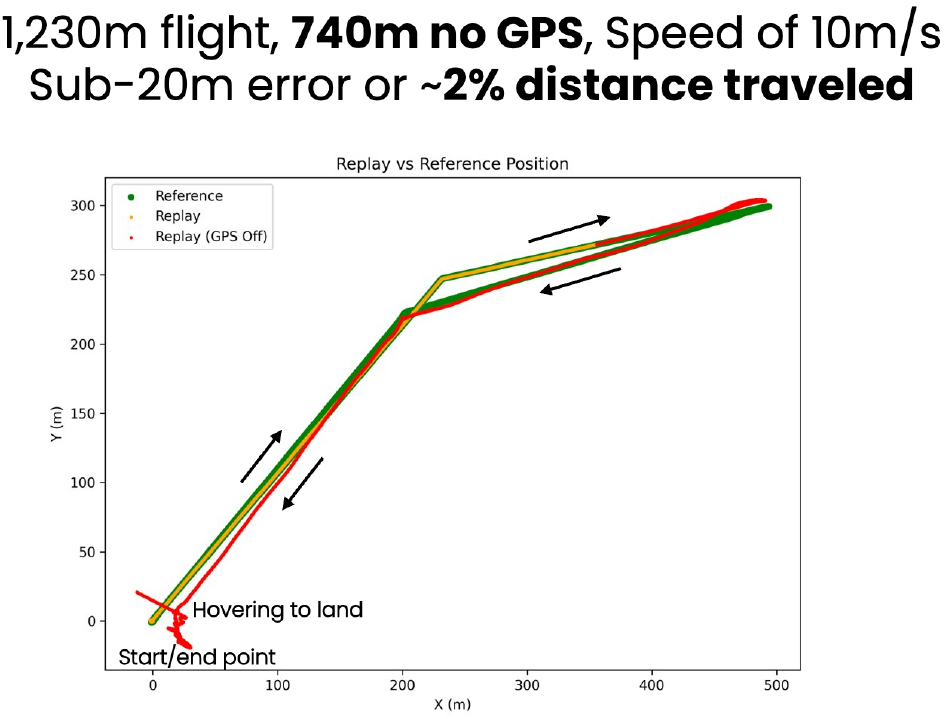
Figure 1: ANELLO Solution vs. Traditional Autopilot in GPS-Denied Conditions
EXECUTIVE SUMMARY
As unmanned aerial systems (UAS) scale into contested airspace, the probability of GPS jamming/spoofing grows sharply. For defense, surveillance, and logistics operations flying beyond visual line of sight (BVLOS), accurate navigation without GPS is critical to mission success and safety. This case study demonstrates how the ANELLO X3 Inertial Measurement Unit (IMU) built on ANELLO’s Silicon Photonics Optical Gyroscope (SiPhOG™) technology delivers precise, low-drift inertial data that enables downstream flight controllers to maintain control, positional accuracy, and mission continuity during real-world GPS outages.

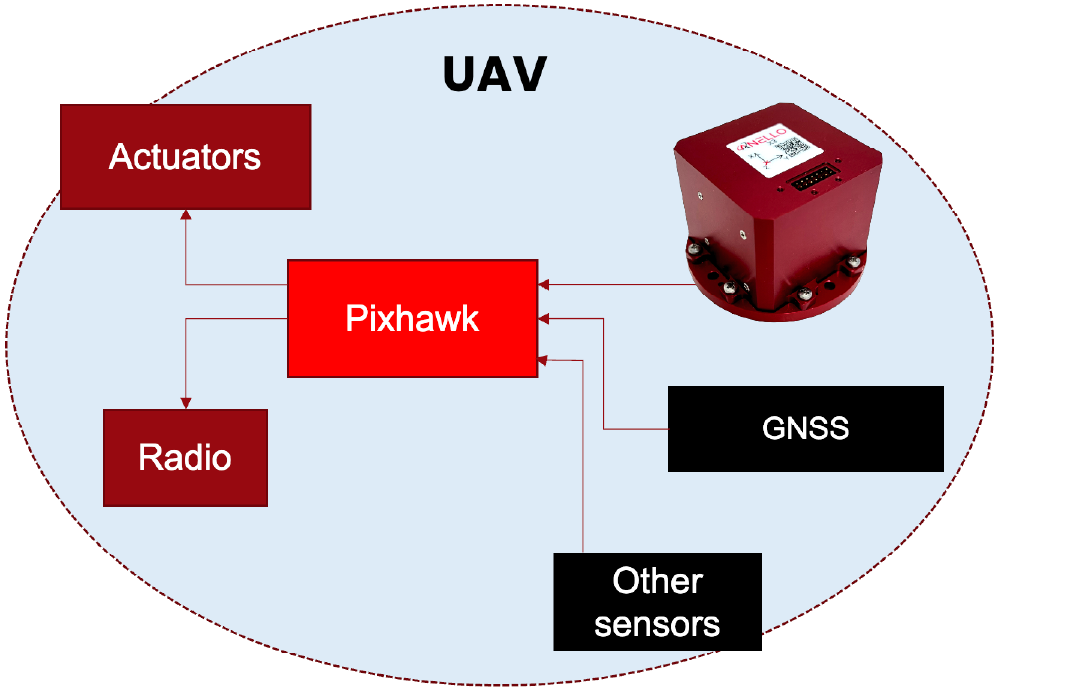
Figure 2: ANELLO X3 IMU mounted on the drone used for GPS-Denied flight testing
BACKGROUND
Modern autopilots heavily weigh GPS inputs. When signals are lost (jamming, spoofing, or terrain masking), most systems trigger contingency behaviors (hover, return-to-launch, or forced landing), causing operational failures and potential asset loss. In this evaluation, the ANELLO X3 IMU, coupled with PX4 sensor fusion and Kalman filtering on a Pixhawk controller, detects GPS degradation and autonomously transitions to dead-reckoning, allowing the aircraft to continue through GPS-denied segments and complete the mission.