
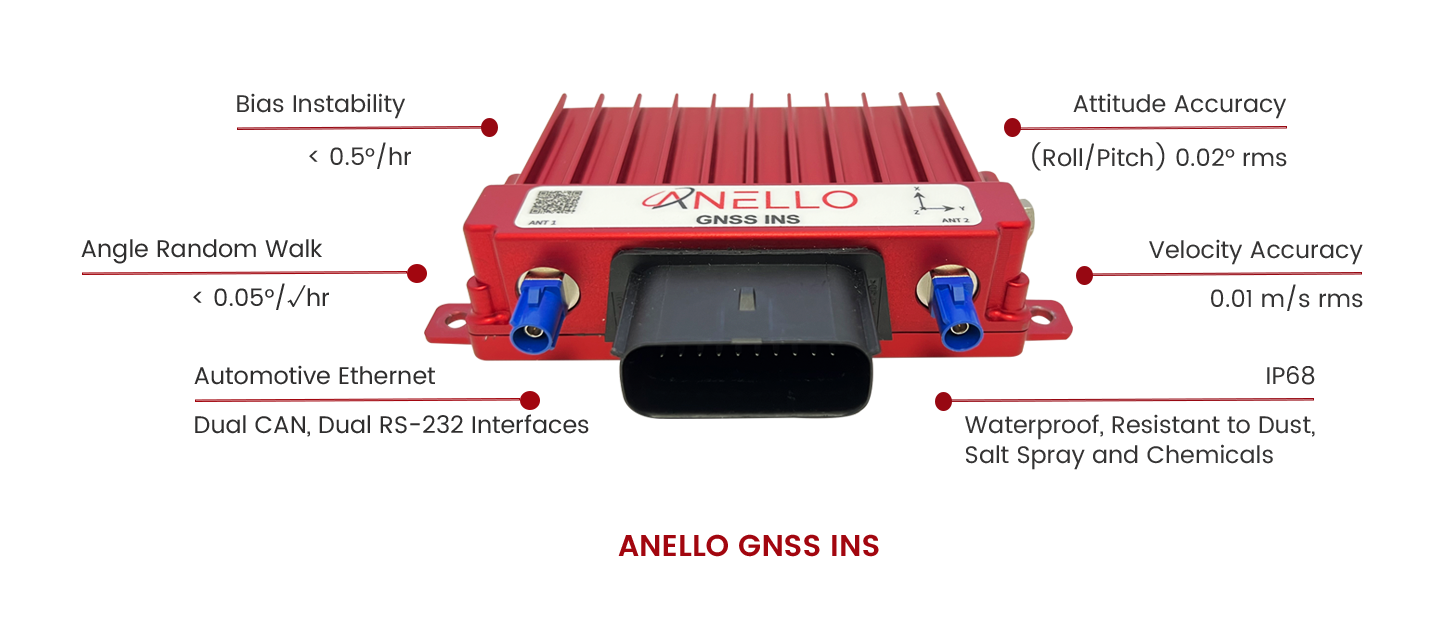
ANELLO GNSS INS
OPTICAL GYRO TECHNOLOGY FOR GNSS-DENIED INERTIAL NAVIGATION AND LOCALIZATION
INTRODUCTION
The ANELLO GNSS INS was built for Long-Term GNSS-Denied Navigation and Localization. The ANELLO GNSS INS delivers robust high-accuracy positioning and orientation for applications in the Agriculture, Construction, Trucking and Autonomous Vehicle space.
UNLOCK PRECISION WITH THE ANELLO GNSS INS
DOWNLOAD DATASHEET FOR THE ANELLO GNSS INS
KEY FEATURES
- < 0.5º/hr Unaided Heading Drift
- Modular Dual Antenna RTK-capable Multi-Band GNSS Engines
- Hardware PTP Time Sync, ASIL-D CPU and OS
- Automotive Ethernet, Dual CAN, Dual RS-232 Interfaces
- IP68 - Waterproof, Resistant to Dust, Salt Spray and Chemicals
- Accurate in severe multipath and GNSS denied
- Dual 184-channel five constellation dual-band GNSS Receivers
- On-Board GNSS/INS Sensor Fusion
- GPS, Glonass, Galileo, Beidou (Compass), QZSS
- Reference-grade 200Hz Position, Velocity and Attitude
- Reliable Autonomous Land Vehicles, Advanced ADAS Systems
- Automotive, Precise Heavy Equipment and Machine Control