
THE ANELLO X3 IMU
UNLOCKING RELIABLE FLIGHT IN GPS-DENIED AIRSPACE
THE ANELLO X3 IMU - UNLOCKING RELIABLE FLIGHT IN GPS-DENIED AIRSPACE

Fig. 1: ANELLO X3 IMU mounted on the drone used for GPS-Denied flight testing
BACKGROUND
THE ANELLO X3 IMU SOLUTION
Key features that make the ANELLO X3 IMU ideal for Airspace include:
- PX4 and ArduPilot Integration
- < 0.5°/hr Gyro Bias Instability
- < 0.05°/√hr Angular Random Walk
- 0.03 m/s/√hr Accelerometer VRW
- < 20μg Accelerometer Bias Instability
- Safety-rated RTOS & CPU
- Triple Redundant MEMS IMU Setup (18 Axes Total)

Fig. 2: ANELLO Solution vs. Traditional Autopilot in GPS-Denied Conditions
The ANELLO X3 IMU delivers best-in-class drift performance with exceptional robustness under real-world conditions. Engineered to excel in dynamic motion and high-vibration environments, the ANELLO X3 IMU maintains reliable accuracy even during complete loss of external positioning inputs - ensuring consistent navigation when it matters most.
SYSTEM ARCHITECTURE & INTEGRATION
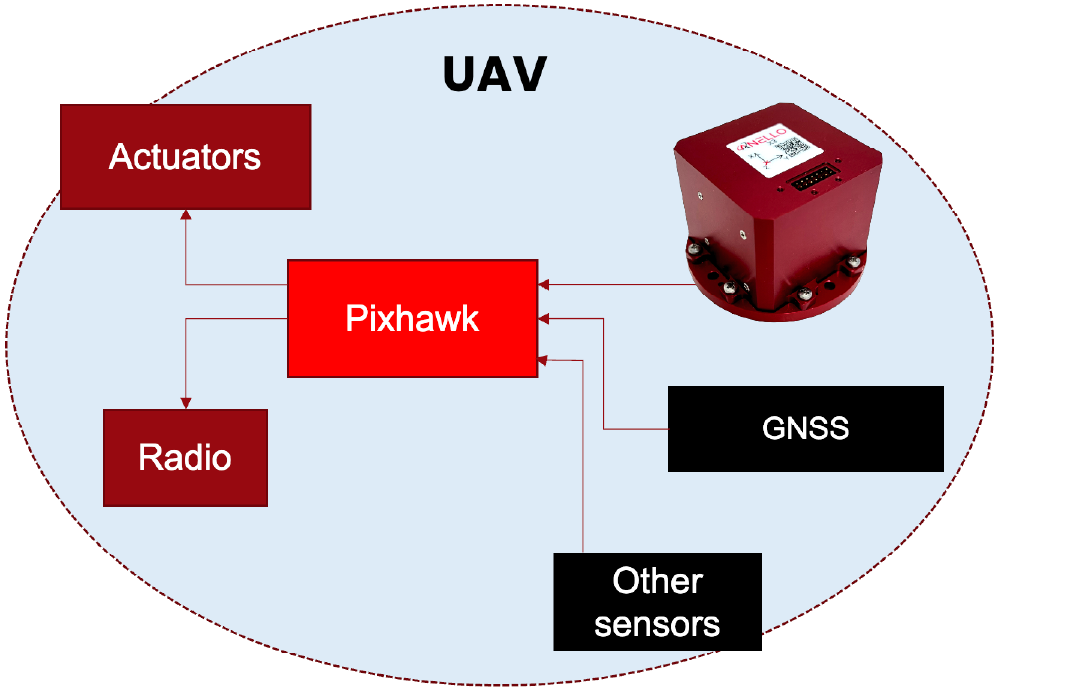
Fig. 3: ANELLO X3 - System Architecture for UAV Navigation
PERFORMANCE ADVANTAGES
TEST FLIGHT RESULTS IN GPS-DENIED AIRSPACE
Integrating ANELLO X3 with commercially available Pixhawk ecosystem

Fig. 4: ANELLO X3 IMU integrated with Pixhawk, with flight demo at ANELLO proving grounds
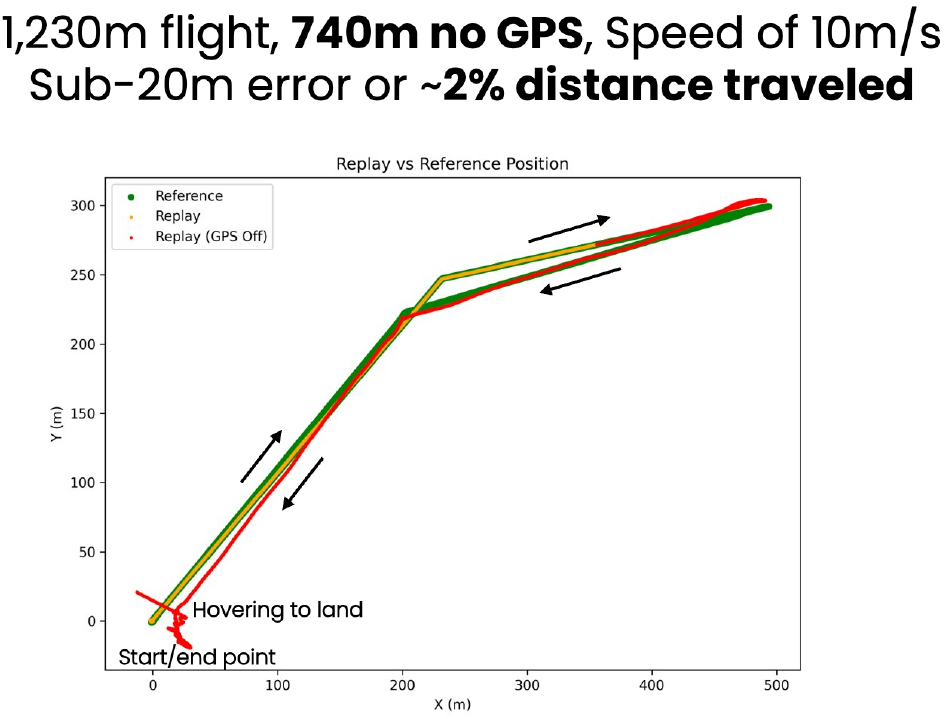
Fig. 5: Flight path showing trajectory during GPS outage