GPS Spoofing, is your car at risk? Test Results from White Sands Missile Range
The US Government conducts GPS jamming and spoofing at White Sands Missile Range. What is the effect of these tests on an average GPS receiver? This blog presents some answers and comparisons, along with an analysis of how the ANELLO EVK fared in these test environments.
ANELLO Photonics has participated in three jamming and spoofing events at White Sands. In general, participants’ results are to remain unpublished. However, at NAVFEST 2022, ANELLO reached agreement with the United States Air Force #746 Test Squadron to allow publication of its summary level test results.
ANELLO collected data from its Optical Gyroscope EVK alongside three GPS engines — U-Blox F9P, ST Teseo V, and Septentrio MOSAIC. In addition, the test setup included OXTS RT3000 and two rear wheel odometers.
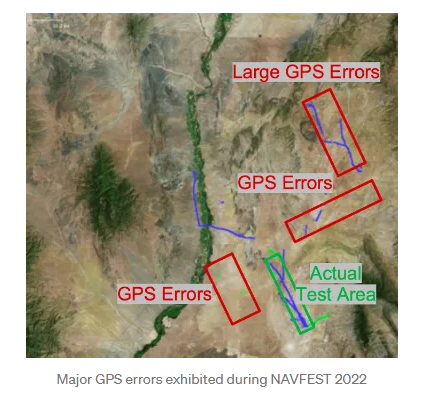
The testing revealed major issues with GPS performance. All three engines suffered loss of GPS signal in many of the tests due to jamming. In addition, Ublox and ST reported wildly inaccurage position data due to GPS spoofing. Examples of GPS errors are shown below and reach 1000 km in magnitude.
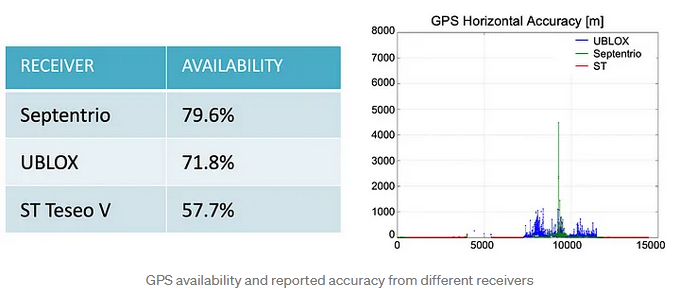
The chart below shows a comparison of availability during one of the tests. In general, the Septentrio Mosaic’s interference mitigation gave it a performance edge during the testing.
Another important consideration is wether the GPS receiver is able to detect and report the spoofing activity. The chart below indicates that the in some cases the accuracy metrics of the receivers disagreed significantly, and in fact may not always reflect the degraded accuracy during a jamming or spoofing event.
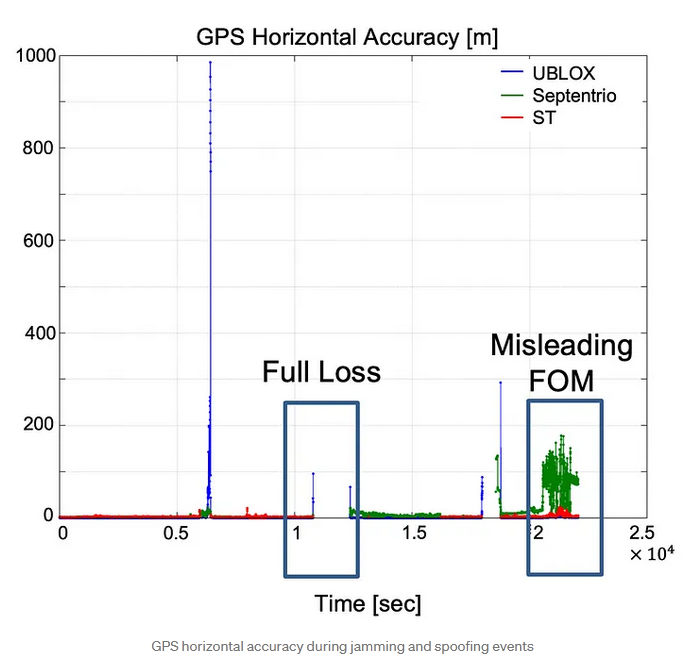
These results indicate that commercial receivers commonly found in automobiles are susceptible to jamming and spoofing, and careful considerations must be taken to ensure the sensor set in the navigation engine is high enough performance to mitigate these effects.
Optical Gyroscope-based INS Helps Mitigate Spoofing
As highlighted above, sensor fusion algorithms generally utilize GNSS solution figures of merit such as horizontal accuracy to determine when to trust the GNSS versus when to trust the IMU. The NAVFEST testing shows that this strategy may not work with all receivers because they may not be aware that their internal position solution is degraded in a spoofing environment.
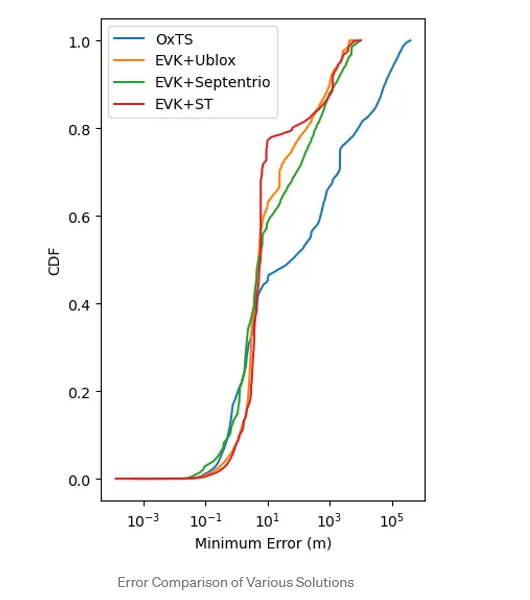
During NAVFEST, the reference solution exhibited large errors which, in some cases, significantly exceed 10 km from the road. Therefore, for error analysis, the 2D error is computed for both the ANELLO and the reference using the minimum distance from the solution to a point on the center line of the road. In other words, the road is used as the reference.
A cumulative distribution function (CDF) of all data collected at NAVFEST is plotted below. The ANELLO EVK significantly outperformed the MEMS-based reference (OxTS), which reflects the criticality of a high-performance heading gyroscope for dead-reckoning. Even with wheel speed aiding, navigation performance drift due to IMU error grows (at least) quadratically with time [1]. In reality, once the error grows large enough (beyond the linearization region), the INS solution performance collapses with rapid additional unbounded rapid error growth. This issue can be observed in the long tail of the CDF of the MEMS reference solution.
Conclusion
This blog shows a summary of results from variety of GPS receivers and INS systems from NAVFEST 2022 testing. A notable conclusion from this data is that the performance difference during these tests is much more dependent on the IMU than the GPS. Even though some GPS receivers may mitigate interference better, the difference is quickly washed out if the interference event is sustained. Using an optical gyroscope-based IMU vs a MEMS-based IMU shows a more impactful performance improvement as compared to choice of GPS engine. ANELLO Photonics aims to bring optical gyroscope technology to the mass market to help mitigate GPS spoofing and jamming in a variety of use cases and environments.