
RELIABLE NAVIGATION IN EXTENDED GPS-DENIED FLIGHT WITH THE ANELLO X3 IMU
THE ANELLO X3 IMU - UNLOCKING RELIABLE FLIGHT IN GPS-DENIED AIRSPACE

Figure 1: ANELLO Solution vs. Traditional Autopilot in GPS-Denied Conditions
EXECUTIVE SUMMARY
As unmanned aerial systems (UAS) scale into contested airspace, the probability of GPS jamming/spoofing grows sharply. For defense, surveillance, and logistics operations flying beyond visual line of sight (BVLOS), accurate navigation without GPS is critical to mission success and safety. This case study demonstrates how the ANELLO X3 Inertial Measurement Unit (IMU) built on ANELLO’s Silicon Photonics Optical Gyroscope (SiPhOG™) technology delivers precise, low-drift inertial data that enables downstream flight controllers to maintain control, positional accuracy, and mission continuity during real-world GPS outages.

Figure 2: ANELLO X3 IMU mounted on the drone used for GPS-denied flight testing
BACKGROUND
Modern autopilots heavily weigh GPS inputs. When signals are lost (jamming, spoofing, or terrain masking), most systems trigger contingency behaviors (hover, return-to-launch, or forced landing), causing operational failures and potential asset loss. In this evaluation, the ANELLO X3 IMU, coupled with PX4 sensor fusion and Kalman filtering on a Pixhawk controller, detects GPS degradation and autonomously transitions to dead-reckoning, allowing the aircraft to continue through GPS-denied segments and complete the mission.
SYSTEM ARCHITECTURE & INTEGRATION
Platform: Hexacopter with Pixhawk flight controller running PX4
External sensors: ANELLO X3 IMU, airspeed sensor, multi-constellation GNSS
Interfaces: ANELLO X3 UART connected to a Pixhawk serial port
Software: ANELLO-supplied X3 driver, PX4 and ArduPilot are supported
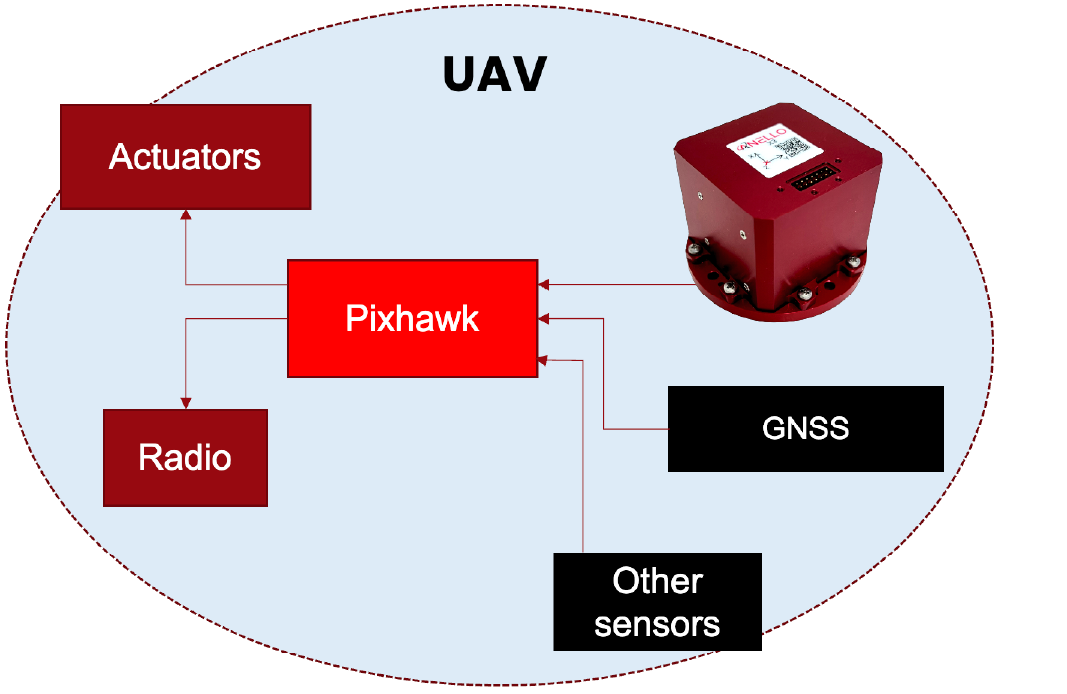
Figure 3: ANELLO X3 IMU - System Architecture for UAV Navigation
MEET THE ANELLO X3 IMU
Designed for GPS-denied autonomy, the ANELLO X3 IMU brings optical-grade gyro performance to a compact, rugged form factor via ANELLO SiPhOG™ technology.
Key Specifications:
Gyro Bias Instability: < 0.5°/hr
Angular Random Walk (ARW): < 0.05°/√hr
Accelerometer VRW: 0.03 m/s/√hr
Accelerometer Bias Instability: < 20 µg
Flight-stack support: PX4 and ArduPilot
Platform: Safety-rated RTOS & CPU
Architecture: Triple-redundant MEMS IMU setup (18 axes total)
Engineered for dynamic motion and high-vibration environments, the ANELLO X3 IMU maintains accuracy through complete losses of external position inputs.

TEST METHODOLOGY
A real-world route of 1,230m was flown; 740m executed without any GPS input to emulate jamming/spoofing. The 20-min. mission included demanding maneuvers at an average airspeed of 10 m/s. Mid-mission the GPS was intentionally removed for >60% of the total route.
Integrating ANELLO X3 IMU with commercially available Pixhawk ecosystem

Figure 4: ANELLO X3 IMU integrated with Pixhawk, with flight demo at ANELLO proving grounds
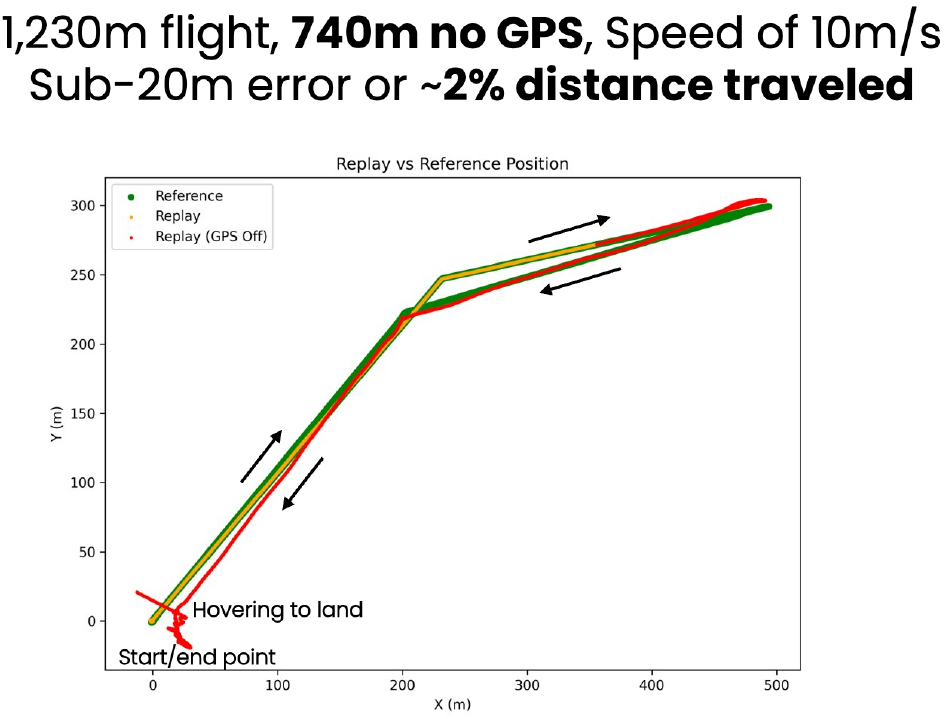
Figure 5: Flight path showing trajectory during GPS outage
RESULTS
Continuity through GPS-denied segments: The aircraft maintained stable control and navigation on inertial dead-reckoning
Low drift over outage: < 20 m position error accumulated over the 740 m GPS-out segment — roughly 1.6% of the total 1.23 km route
Controller compatibility: The ANELLO X3 IMU fed PX4 fusion cleanly with no custom tuning beyond standard configuration
PERFORMANCE ADVANTAGES
Reliable continuity in GPS-denied airspace: Enables mission carry-through without invoking failure modes
Tight drift control: Sub-20 m error over a 740 m GPS outage - demonstrably superior to typical small-UAS inertial solutions
Fast time-sync & drop-in integration: Digital interface, calibration features, and native drivers enable fast deployment
Robust 6-DOF handling: Accurate heading and position support during aggressive UAV maneuvers
CONCLUSION & NEXT STEPS
Validated flight testing demonstrates that the ANELLO X3 IMU provides a dependable inertial core for autonomous flights in contested or GPS-challenged environments. By combining SiPhOG™ optical gyros with mature sensor fusion, the ANELLO X3 IMU enables precise, low-drift navigation when GPS is degraded or unavailable and is integrating seamlessly with PX4 or ArduPilot to convert existing airframes into mission-ready, GPS-denied platforms.
Interested in integrating the ANELLO X3 IMU or running a pilot? Contact info@anellophotonics.com to discuss interfaces, drivers, and evaluation units.