
INTERVIEWS & ARTICLES
Integrated Photonics Leads a Charge to the Next Wave in Resilient Navigation
For nearly three decades, global navigation satellite systems (GNSS) have been an indispensable technology underpinning the modern world’s logistics, finance, energy, and security systems. The effectiveness of these systems, coupled with their utility across critical sectors, has established GNSS as an essential global technological resource.
At the same time, society’s profound reliance on these systems has created a critical vulnerability. As our dependence on GNSS signals for precise positioning, navigation, and timing (PNT) has grown, so too has the scale and sophistication of GNSS interference.
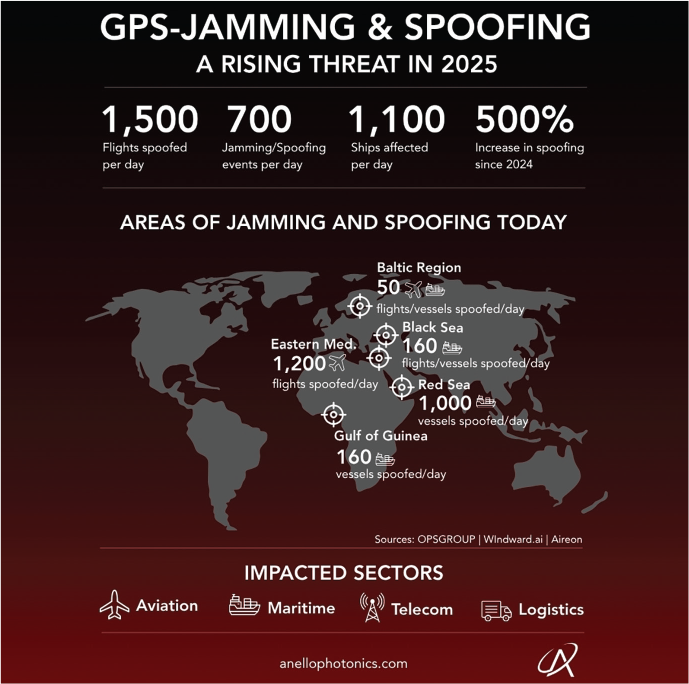
The trend is clear. Recent industry and governmental reporting tallies hundreds of daily GNSS jamming and spoofing incidents. This represents a more than fivefold year-over-year increase, driven by the proliferation of cheap, accessible radio technology and escalating geopolitical tensions (Figure 1).
Moreover, these events affect thousands of commercial flights and maritime vessels, making them a concern for both the commercial and defense sectors. In October 2025, Qatar’s Ministry of Transport imposed an unprecedented, nationwide suspension of maritime navigation after a severe GPS disruption. The Ministry’s action signals the arrival of a new era in which PNT fragility is a mainstream operational and economic risk. It is no longer rare to see surface and aerial vehicles reporting erroneous positions or the complete loss of position fix. For designers of autonomous systems, PNT resilience has shifted from a nice-to-have feature to a foundational requirement.
GPS-Jamming & Spoofing | ANELLO Photonics
The ease with which radio frequency signal disruption can now be performed underpins the current security reality. A small, ground-based jammer — often costing only a few hundred dollars — can transmit high-energy noise on the L-band, effectively desensitizing GNSS receivers across several kilometers. More powerful or elevated systems can create denial zones extending tens of kilometers.
GNSS spoofing — a more deceptive interference in which counterfeit GNSS signals with controlled time and position biases are broadcast — is also gaining prevalence. While jamming is easy to detect, as the position fix is simply lost, spoofing can create a subtle and often catastrophic deception. It can trick a GNSS receiver into calculating a strong, confident, and entirely incorrect position. Such an error may lead an autonomous vessel, vehicle, or drone deliberately off course and possibly into harm’s way.
These jamming and spoofing events routinely last for several minutes to more than an hour — durations that far exceed the dead-reckoning capabilities (i.e., the use of inertial sensors to estimate position) of the low-cost sensors common in today’s mass-market electronics.
Silicon photonics for navigation
When satellite signals vanish, a platform must rely on inertial navigation — the process of calculating position by tracking changes in motion. The core of any inertial navigation system (INS) is the gyroscope. The quality of this sensor directly determines how long a system can operate without a GNSS fix before its position error grows excessively large. This error growth is largely limited by the gyroscope’s bias instability, or drift, typically reported in degrees per hour (deg/h).
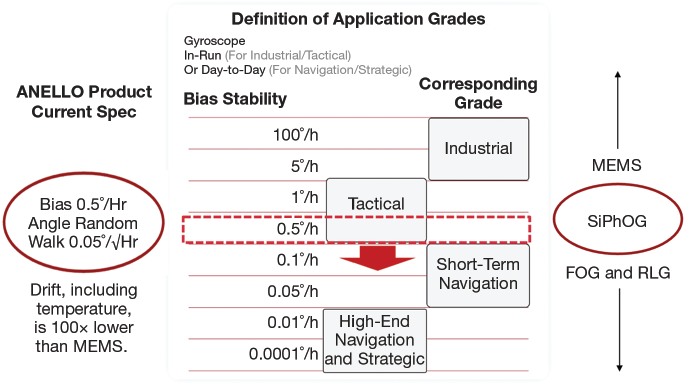
For decades, a fundamental trade-off has characterized the gyroscope market. At one end are microelectromechanical systems (MEMS) gyroscopes. These devices are solid-state, tiny, and cost- and power-efficient, making them ubiquitous in phones and other consumer electronics. They sense rotation via the Coriolis effect, where a driven, vibrating proof mass experiences orthogonal motion proportional to angular rate, which is then demodulated electrically.
But the same vibratory mechanism makes MEMS gyroscopes vulnerable to environmental effects such as vibrations, thermal gradients, and acoustic disturbances. Combined with their high noise and large bias instability, often tens to hundreds of deg/h, these effects cause rapid error growth. These devices are largely unsuitable for navigating in more than a few seconds of GNSS outage.
High-performance optical gyroscopes, such as fiber optic gyros (FOGs) and ring laser gyros (RLGs), occupy the other end of the spectrum. These legacy systems offer exquisite performance with extremely low bias instability, often <0.1 deg/h, to enable true strategic-grade navigation. They achieve this using the Sagnac effect: Light traveling around a loop experiences a tiny path-length difference when the loop rotates, providing an absolute measure of rotation with exceptional stability.
In FOGs, the rotation shifts the light’s interference pattern in direct proportion to the spin rate. In RLGs, it causes the two counter-traveling beams to lase at slightly different frequencies that produce a beat note proportional to the rate. These sensors provide exceptional stability, though at a cost: FOGs and RLGs are large, heavy, power-hungry, and expensive to manufacture. Their use is therefore restricted to large, high-value assets such as submarines, satellites, and fighter and passenger aircraft.
Definition of Application Grades & Product Specs | ANELLO Photonics
ANELLO Maritime INS Infographic | ANELLO Photonics
ANELLO Maritime INS Case Study | ANELLO Photonics
This gap between low-cost, low performance MEMS and high-cost, high-performance FOGs and RLGs has left a massive segment of the autonomous systems market without a viable option for robust, long-duration dead reckoning and GPS-denied navigation solutions.
Recent advancements in integrated photonics systems and design are changing this calculus, enabling the miniaturization of complex optical systems onto a single silicon chip at performance levels necessary to enable precision applications. ANELLO Photonics’ silicon photonics optical gyroscope (SiPhOG) illustrates this direction. By fabricating microscopic waveguides, modulators, polarization filters, splitters, couplers, and detectors using CMOS-compatible processes, the size, weight, power, and cost (SWaP-C) burden of optical gyroscopes can be significantly reduced.
SiPhOG integrates the optical gyroscope on a silicon-photonics chip, delivering a compact, robust form factor with bias instability of <0.5 deg/hr (Figure 2). This preserves the fundamental physics of the Sagnac effect — which makes optical gyroscopy stable and high-performing — while leveraging the scalability and robustness of silicon photonics.
Unmanned systems: A case study
Opportunities to deploy integrated photonics-enabled PNT sensing technology are clearly illustrated in the maritime domain. Unmanned surface vessels (USVs) and unmanned underwater vehicles (UUVs) are increasingly tasked with critical, long-duration missions in contested waters, from subsea infrastructure inspection to national security operations. Forfeiting reliable positioning in real time is not an option for these platforms.
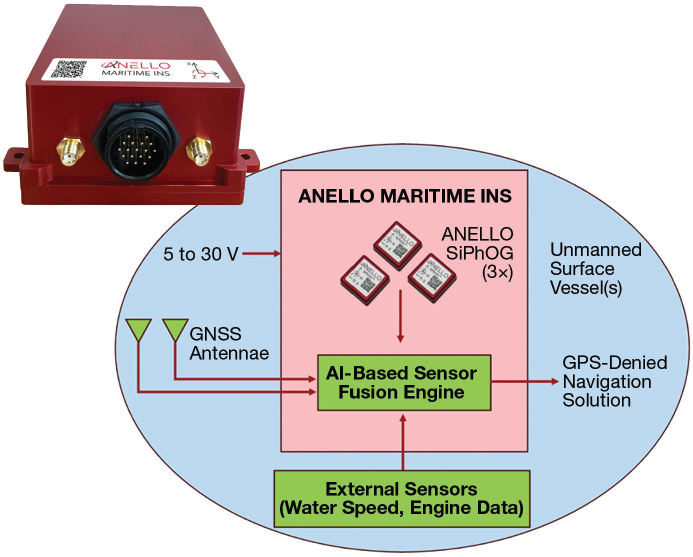
The Maritime INS developed by ANELLO provides a useful case study in applying this technology. The system’s core is built around three SiPhOGs coupled with triple-frequency, dual-antenna GNSS receivers and a sophisticated sensor fusion engine designed specifically for the dynamics and challenges of maritime operations (Figure 3).
For these deployments, the novelty exists not only in the quality of the inertial data, but also in the intelligent fusion layer that synthesizes all available information. The system’s fusion engine uses an extended Kalman filter (EKF) augmented with machine learning techniques to continuously estimate the vessel’s position, velocity, and attitude — its roll, pitch, and heading. This sensor fusion engine ingests data from diverse aiding sensors, continuously learning to model and account for environmental factors. For example, the system can learn the local current vector by taking speed-through-water measurements from a simple 1D paddle wheel or ultrasonic sensor. By maintaining this estimate, it can differentiate between true inertial drift and the vessel being pushed by currents. This information enables the system to trust the low-drift SiPhOGs during a GNSS outage without being misled by environmental effects.
For UUVs and some USVs, Doppler velocity log sensors provide an even more powerful aiding source. By pinging the seafloor with acoustic signals, a Doppler velocity log can measure velocity over ground, independent of water currents. While Doppler velocity logs are typically limited in maintaining a "bottom lock" at no more than 100 m above the sea floor, their combination with a low-drift, SiPhOG-based INS can dramatically reduce dead-reckoning error.
ANELLO Maritime INS Case Study | ANELLO Photonics
Beyond these traditional aiding sources, a robust PNT architecture is designed to integrate various sensors of opportunity. The system architecture can incorporate visual navigation, using cameras to identify charted landmarks for position fixes, or celestial navigation (or star trackers) for coarse position updates in clear weather. This approach creates a layered and resilient solution where the temporary loss of any single aiding source does not compromise the mission.
In this way, the Maritime INS sensor fusion engine is architected to ingest these disparate data types, using them as periodic updates to bound the drift of the core inertial solution over ultralong periods of GNSS denial.
Results in contested environments
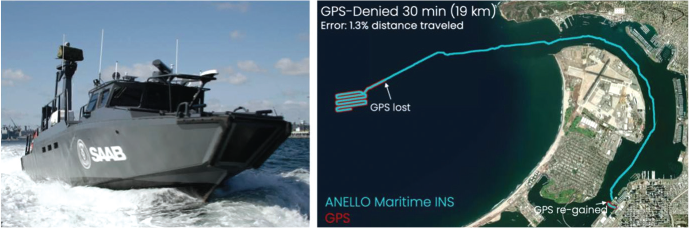
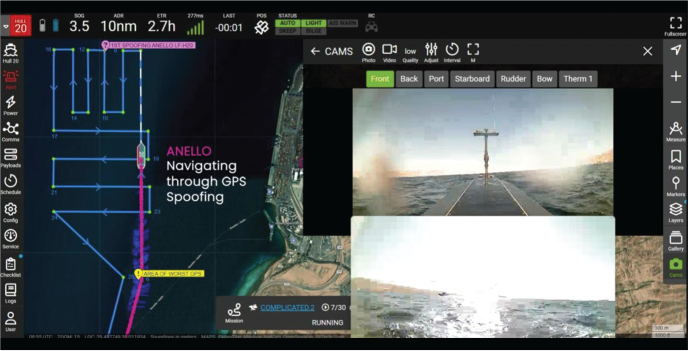
The ultimate test of any navigation system is performance in the field. The Maritime INS and its silicon photonics technology have demonstrated resilience through extensive customer exercises, live demonstrations, and in-theater deployments (Figures 4 and 5). These sea trials were performed on a wide range of USVs at events including BlueTIDE in Newport, R.I.; AFCEA West in San Diego; Project Convergence in Honolulu; and Silent Swarm in Alpena, Mich. Each USV was equipped with at most a 1D speed-through-water sensor. Operations ranged from minutes to hours of GNSS denial in a variety of sea-state conditions and speeds. GNSS-denied performance is often presented as a percentage of distance traveled (% DT), a metric that normalizes error across different speeds and mission lengths. During high-speed transits at >30 knots, complete GNSS outages lasting dozens of minutes have produced dead-reckoning errors of just 1% to 2% DT. At these speeds, the vessel’s rapid dynamics help to average out speed-through-water sensor noise, and the impact of current estimation errors is relatively small. At more common transit speeds of 10 to 30 knots, accuracy is maintained within 2% to 3% DT. The most challenging scenario is a small vessel at slow speeds (4 to 10 knots), where speed sensor biases and unmodeled currents can dominate the error budget. Even at these low speeds, and with only a basic paddle wheel for aiding, the system reliably maintains position within 3% to 5% DT.
These capabilities have been validated not just in demonstrations but also through successful deployments overseas, including the Middle East, enabling USVs to navigate reliably through real-world GNSS jamming and spoofing.
Outlook for systems designers
The successful deployment of the silicon photonics-based Maritime INS demonstrates an inflection point for resilient navigation. As integrated silicon photonics technology has matured over the decades, continued advancements in wafer-scale manufacturing and packaging have built a foundation for ANELLO to develop optical-grade inertial performance in a chip-scale form factor. The result is the integration of GNSS-denied navigation capability into even smaller, more cost-sensitive platforms.
For engineers and operators designing the next generation of autonomous systems, the takeaways are clear: First, GNSS can no longer be treated as a guaranteed utility. A robust plan for operating through denial, degradation, and deception must be a primary architectural consideration. Second, the choice of gyroscope dictates the system’s resilience timescale. While MEMS are sufficient for seconds-long signal interruptions, navigating through multi-minute or hour-long outages requires an opticalgrade inertial sensor.
Lastly, integrated silicon photonics technology has fundamentally altered the trade-off between performance and SWaP-C. It enables systems designers to integrate high-performance deadreckoning capabilities into a wider range of unmanned maritime, aerial, and ground vehicles without compromising mission payload or endurance.
As autonomy pushes into more complex and contested environments, the prospect for maritime, aerial, and land vehicles to navigate with confidence — with or without satellite signals — will be the defining feature of successful and reliable systems.
To read the full article, go to https://www.photonicsspectra-digital.com/photonicsspectra/january_2026/MobilePagedArticle.action?articleId=2103223#articleId2103223
ANELLO® and SIPHOG™ are registered trademarks of ANELLO Photonics.
Media Contact:
Gerhard Boiciuc
gerhard.boiciuc@anellophotonics.com