
RESILIENT MARITIME NAVIGATION IN GPS-DENIED ENVIRONMENTS
RESILIENT MARITIME NAVIGATION IN GPS-DENIED ENVIRONMENTS
EXECUTIVE SUMMARY
As autonomous and crewed vessels increasingly operate in GPS-contested waters, reliable navigation during GPS jamming and spoofing becomes essential for mission continuity.
The ANELLO Maritime INS, powered by theSilicon Photonics Optical Gyroscope (SiPhOG™), delivers resilient, low-drift navigation performance in GPS-denied environments, ensuring precise positioning and control for defense, commercial, and research maritime operations.
KEY TECHNICAL INSIGHTS
Gyro bias and heading error are the primary drivers of navigation drift
SiPhOG™ technology enables sustained, low-drift dead reckoning over extended durations
Velocity aiding and environmental modeling are critical for maritime navigation accuracy
CHALLENGE
Maritime navigation depends heavily on GNSS signals for navigation. However, GPS interference, whether from spoofing, jamming, or multipath effects poses a growing challenge near ports, coastlines, and in active EW (Electronic Warfare) zones. The ANELLO Maritime INS has been successfully tested in multiple real-world scenarios to validate its performance under GPS degradation and total loss, maintaining precise positioning across diverse environments.
Today, maritime navigation systems must operate under:
GNSS-denied conditions (jamming/spoofing) lasting minutes to hours
A range of sea states including heavy currents and winds
Harsh shock and vibration environments
Limitations of conventional approaches:
MEMS IMUs: Large heading and position drift; susceptible to environmental effects from thermal gradients, shock and vibration
Traditional FOGs/RLGs: Provide low drift but are constrained by large size, power, and cost
Without adequate inertial performance, position error grows as a function of gyro bias and velocity integration, making long-duration autonomy not feasible.
SOLUTION: ANELLO MARITIME INS
The ANELLO Maritime INS integrates SiPhOG™ optical gyroscopes with a tightly coupled sensor fusion architecture to minimize drift propagation.
Inertial Core:
Gyro bias instability: <0.5°/hr
Angular random walk: < 0.05 °/rt(hr)
Triple-redundant IMU configuration for fault tolerance and noise averaging
System Capabilities:
Precise inertial navigation solution regardless of GNSS availability
Real-time bias estimation and compensation
Robust operation under dynamic motion and vibration
SYSTEM ARCHITECTURE
The Maritime INS implements a multi-sensor fusion architecture:
State Estimation
Extended Kalman Filter (EKF) estimating real-time position, velocity and orientation.
Aiding Inputs
Speed aiding:
Doppler Velocity Log (DVL): Direct velocity over ground measurement
Paddle wheel or ultrasonic speed sensor: Speed-through-water
Absolute position aiding:
Internal GNSS (when available)
Optional external aiding sources:
M-Code GNSS
Vision-based Navigation
Celestial Navigation
Environmental Modeling
Machine learning augmentation estimates ocean current vectors, enabling separation of true vehicle motion vs motion measured by speed sensors due to water currents. This improves system observability and reduces long-term position error accumulation.
RESULTS
Maritime field deployments of the ANELLO Maritime INS demonstrate:
Stable inertial navigation during GNSS outages
Error correction through velocity aiding (DVL, speed-through-water)
Robust navigation under sensor dropouts
The system maintains navigation accuracy by constraining velocity error, continuously estimating IMU bias, and compensating for environmental disturbances. This results in significantly reduced drift compared to MEMS-only systems, enabling extended autonomous operation. In a 30-minute GNSS-denied USV deployment, the system achieved 1.3% total drift (Figure 1).
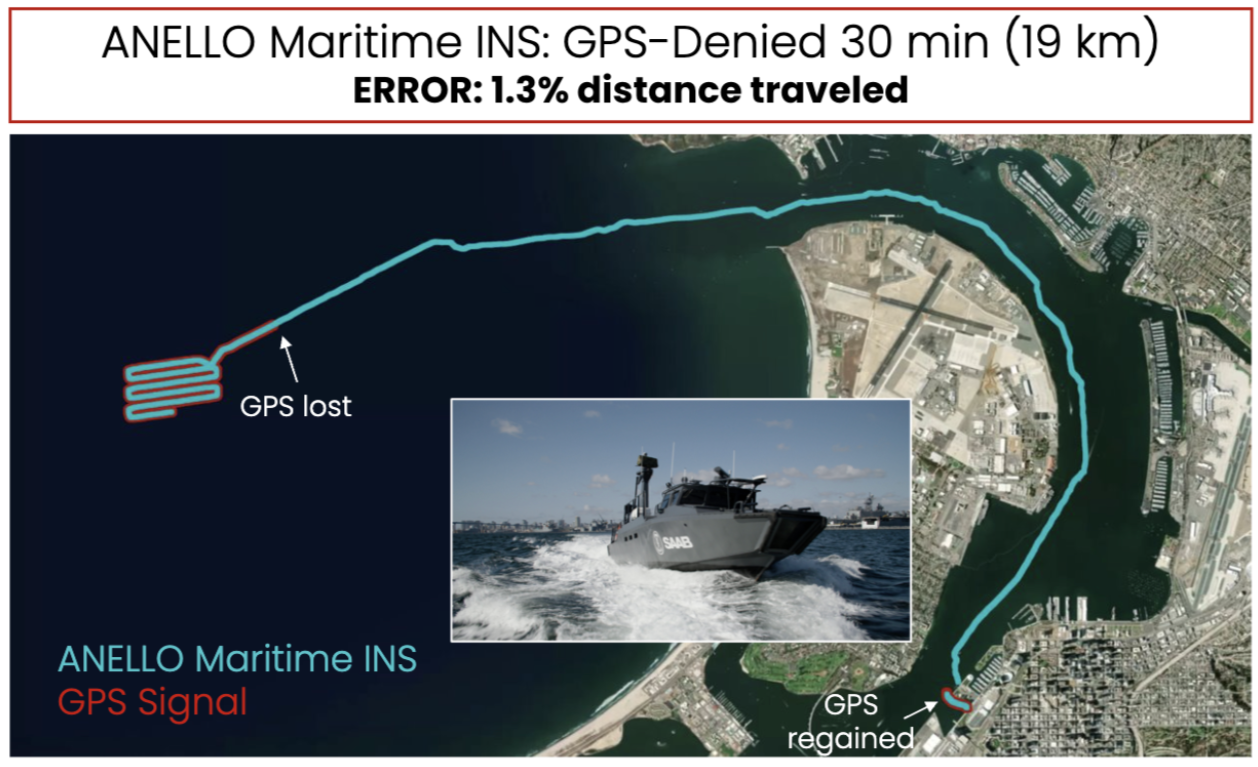
Figure 1: SAAB USV demonstration in 30-minute GPS-denied operation with only 1.3% total drift
The example below shows the ANELLO Maritime INS maintaining stable navigation performance during real-world GNSS jamming and spoofing, demonstrating resilience in contested environments while enabling continued USV operations. Conducted in the Gulf of Aqaba, Jordan, this testing highlights the system’s ability to sustain reliable positioning and navigation performance despite GPS spoofing and signal degradation (Figure 2).
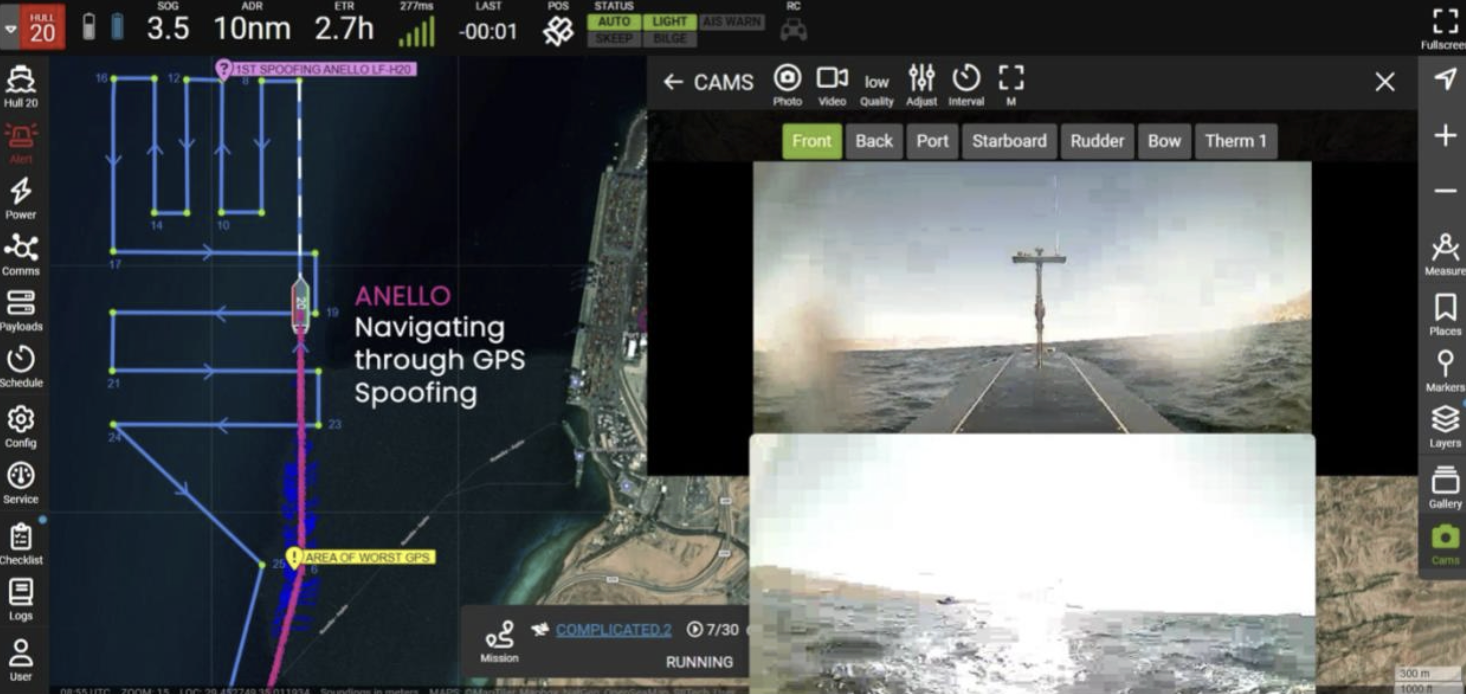
Figure 2: ANELLO Maritime INS navigating through GPS spoofing and signal degradation
PERFORMANCE ADVANTAGES
Low gyro bias reduces heading-induced position drift
Improved observability through heterogeneous sensor fusion
Resilience to GNSS loss and individual sensor degradation
Reduced SWaP relative to traditional optical INS systems
The ANELLO Maritime INS solution effectively bridges the performance gap between MEMS and FOG, enabling scalable deployment across maritime platforms.
CONCLUSION
The ANELLO Maritime INS enables high-fidelity dead-reckoning by combining:
Low-drift silicon photonics inertial sensing
Advanced state estimation with real-time bias modeling
Multi-sensor velocity aiding and environmental compensation
This architecture supports long-duration navigation with bounded error, enabling reliable operation in GPS-denied conditions. Built on ANELLO’s proprietary SiPhOG™ (Silicon Photonic Optical Gyroscope) technology, the system delivers continuous, high-precision navigation in the presence of jamming, spoofing, or complete GNSS loss. Designed for contested maritime environments, the ANELLO Maritime INS ensures mission-critical position and heading data for defense platforms, autonomous vessels, and commercial fleets. With proven performance in operational deployments and ongoing integration across defense and commercial programs, ANELLO continues to advance resilient, GPS-independent maritime navigation.
For integration details or pilot programs, contact info@anellophotonics.com